Поток событий определяет выполнение алгоритмов, содержащихся в функциональных блоках. В состав функциональных блоков могут входить и другие программные приложения (субприложения).
Программные приложения могут быть распределены между несколькими ресурсами в одном или в нескольких устройствах (ПЛК). Ресурс реагирует на события, поступающие из интерфейсов, следующими способами: планированием и исполнением алгоритма;
модифицированием переменных;
генерацией ответных событий;
взаимодействием с интерфейсами.
Архитектура системы с общей шиной.
Архитектура распределенной системы промышленной автоматизации на основе общей шины показана на рис. 1.7.
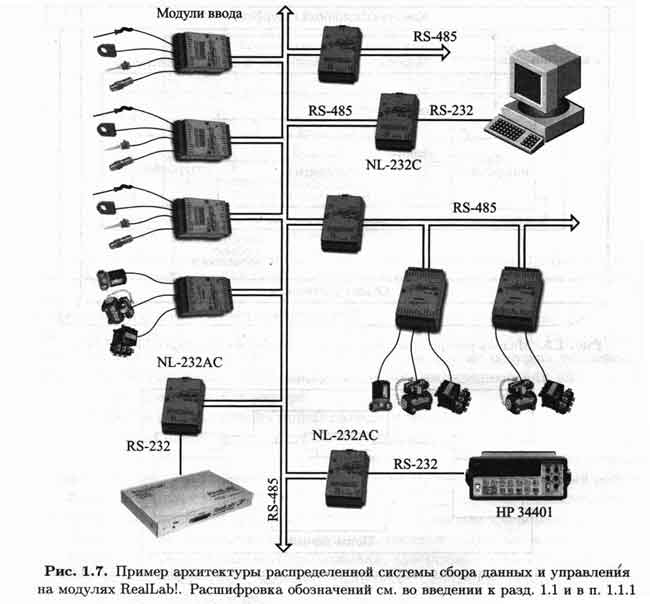
Для того чтобы получить данные из модуля или контроллера, компьютер (или контроллер) посылает в шину его адрес и команду запроса данных. Микропроцессор, входящий в состав каждого модуля или контроллера, сверяет адрес на шине с его собственным адресом, записанным в ПЗУ, и, если адреса совпадают, исполняет следующую за адресом команду. Команда позволяет считать данные, поступающие на вход устройства, или установить необходимые данные на его выходе.
Распределенная система с общей шиной порождает две новые проблемы по сравнению с топологией «точка-точка» (когда соединяются только два устройства, как на рис. 1.1): необходимость адресации устройств и необходимость ожидания в очереди. Добавление адреса в коммуникационный пакет снижает скорость обмена при коротких сообщениях, а обмен по общей шине приводит к тому, что каждое устройство для передачи сообщения должно ждать, когда шина станет свободной. Это замедляет скорость обмена между устройствами по сравнению с топологией «точка-точка». Задержка в сетях с большим количеством устройств становится существенным ограничением на применение топологии с общей шиной [21] в некоторых приложениях, в частности в случае ПИД-регулирования, когда задержка в сети ограничивает тактовую частоту работы контура регулирования. Для таких случаев используют локальные подсети или локальные технологические контроллеры.
Распределенные системы позволяют решить также следующую проблему. С ростом количества датчиков в системе, показанной на рис. 1.1, увеличивается число и суммарная длина проводов, соединяющих датчики с устройством ввода. Это приводит не только к росту стоимости кабельного оборудования, но и к проблемам, связанным с электромагнитными наводками, особенно если датчики распределены по большой площади (например, в промышленной теплице датчики распределены по площади около 6 Га, а в элеваторе число датчиков достигает 3...5 тыс. шт.). В распределенной системе модули ввода-вывода изготавливаются с небольшим количеством входов (обычно от 1 до 16), а сами модули располагаются вблизи места установки датчиков. Увеличение количества датчиков (входов) достигается путем наращивания числа модулей и объединения их с помощью общей шины. Это сокращает общую длину проводов в системе, а также длину проводов с аналоговыми сигналами.
Связь отдельных устройств в распределенной системе может осуществляться с помощью любой промышленной сети (см. главу 2). Наиболее распространены в России сети Profibus, что связано с популярностью изделий фирмы Siemens, а также сети Modbus с физической шиной RS-485 благодаря распространенности модулей и контроллеров фирм ICP DAS, Advantech и НИЛ АП. За последние годы стремительно возросло количество используемых сетей Ethernet (точнее, Industrial Ethernet) в качестве промышленных сетей при скорости передачи 10, 100 и 1000 Мбит/с.
Некоторые модули ввода-вывода, входящие в состав распределенных систем, позволяют по команде из компьютера выполнять функции автоматического регулирования (например, модули NL-8TI, NL-16AI фирмы НИЛ АП). Для этого в них посылают значение уставки и параметры ПИД-регулятора (пропорциональный, дифференциальный и интегральный коэффициенты), затем команду запуска процесса регулирования. Наличие ПИД-регулятора в модулях распределенной системы позволяет осуществить локальное регулирование (например, поддержание стабильной температуры в камере тепла и холода), разгрузив общую шину для выполнения других задач.
Распределенные системы строятся, как правило, из коммерчески доступных компонентов (ПЛК. модулей ввода-вывода, датчиков, исполнительных устройств). Однако для однотипных тиражируемых систем может быть выгодно строить специализированные системы, состоящие из полностью заказных (вновь спроектированных) аппаратных и программных средств [24]. Граница целесообразности такого подхода определяется объемом выпуска изделий.
Программирование распределенных систем автоматизации выполняется стандартными средствами, рассмотренными в главе 9.