Из выражения (2) видно, что угол перемещения подвижной части прибора, пропорционален квадрату измеряемого тока и изменению индуктивности прибора при повороте его подвижной части, т. е. dL/dα.
При изменении направления тока в катушке электромагнитного прибора меняются одновременно на противоположные магнитные полюсы ферромагнитного сердечника, вследствие чего направление вращающего момента подвижной части прибора не меняется. Поэтому приборы электромагнитной системы пригодны для измерений в цепях как постоянного, так и переменного токов.
Основные достоинства приборов электромагнитной системы -простота и надежность устройства, высокая перегрузочная способность (сечение провода для катушки может быть взято с запасом), дешевизна и возможность использования для измерений в цепях постоянного и переменного токов.
К недостаткам приборов этой системы можно отнести невысокий класс точности измерений, который обычно не выше 1,0 из-за влияния гистерезиса; относительно большое собственное потребление мощности (в катушках амперметров - до 1 Вт, а в вольтметрах с потреблением мощности в добавочных сопротивлениях - до 6 Вт); неравномерность шкалы (особенно сильно она сжата в начале); низкая чувствительность, из-за чего эти приборы непригодны для измерения малых токов и напряжений; зависимость показаний от внешних магнитных полей, так как собственное поле катушки расположено в воздушной среде и поэтому его индукция незначительна; ограниченность диапазона частот (не выше 8000 Гц).
Необходимо отметить, что приборы электромагнитной системы из-за дешевизны, простоты устройства и большой перегрузочной способности широко используются в промышленных электротехнических устройствах низкой частоты в виде амперметров и вольтметров.
3.5.2. Приборы электродинамической системы
Принцип действия приборов электродинамической системы основан на взаимодействии проводников с токами. Известно, что два проводника с токами взаимно отталкиваются, если токи в них имеют одинаковое направление, и взаимно притягиваются при различном направлении токов.
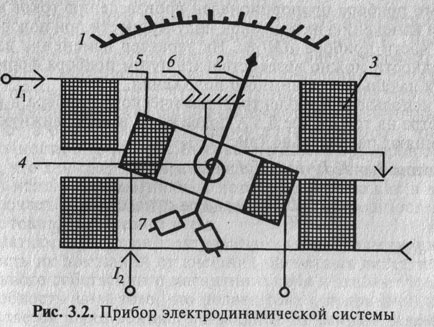
Прибор этой системы (рис. 3.2) состоит из двух катушек: неподвижной 3, состоящей из двух секций, которые соединены между собой последовательно, и подвижной 5, закрепленной на оси 4 и вращающейся на ней внутри неподвижной катушки. Ток к подвижной катушке подводят через закрепленные на оси спиральные пружинки 6, которые одновременно создают противодействующий момент MПР пропорциональный углу закручивания α . При этом пружина электрически изолирована от оси. На оси подвижной катушки закреплены также указательная стрелка 2 и крыло воздушного успокоителя (на рис. не показан). Для повышения класса точности прибора и его чувствительности обмотку подвижной катушки выполняют из тонкой изолированной проволоки на ток не более 0,5 А.
При прохождении токов по катушкам электродинамического прибора ток подвижной катушки I2 взаимодействует с магнитным ртоком Ф1, созданным током I1, неподвижной катушки, т. е. создается вращающий момент МВР. Его определяют через изменение энергии магнитного поля при повороте его подвижной части, т. е. cогласно выражению:
MВР = d WM / dα
При перемещении подвижной катушки изменяются энергия магнитного поля и, следовательно, -взаимная индуктивность М катушек. Энергия магнитного поля взаимной индуктивности

Подставляя в выражение вращающего момента значение WM из (3) и cчитая токи подвижной I2 и неподвижнойI1 , катушек неизменными, получают общее выражение вращающего момента для электродинамических приборов:

Противодействующий момент, уравновешивающий вращающий момент, пропорционален углу перемещения подвижной части прибора:
MПР = K·α
При установившемся состоянии подвижной части прибора, когда вращающий момент равен противодействующему, имеем
MВР = MПР
или I1 · I2 · dM /dα = K · α
Из этого выражения находят зависимость для угла перемещения подвижной части прибора

Из (5) следует, что угол поворота подвижной части электродинамического прибора пропорционален произведению токов в его катушках и изменению их взаимной индуктивности при повороте подвижной части прибора dM/dα. На характер изменения взаимной индуктивности можно воздействовать путем, подбора формы катушек и их начального взаимного положения.
При использовании электродинамического прибора в качестве амперметра на ток свыше 0,5 А подвижную и неподвижную катушки соединяют параллельно (рис 3.3).
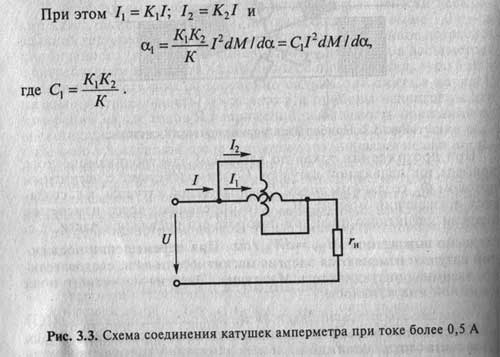
Следовательно, в амперметре электродинамической системы шкала неравномерная (квадратичная), причем в ее начале деления сильно сжаты. Для получения более равномерной шкалы катушкам придают специальную форму.
В вольтметрах электродинамической системы катушки в большинстве случаев соединяют между собой последовательно и снабжают добавочным сопротивлением.
В вольтметрах электродинамической системы шкала прибора, как и в амперметрах этой системы, квадратичная.
В отличие от амперметров и вольтметров ваттметры электродинамической системы имеют практически равномерную шкалу.